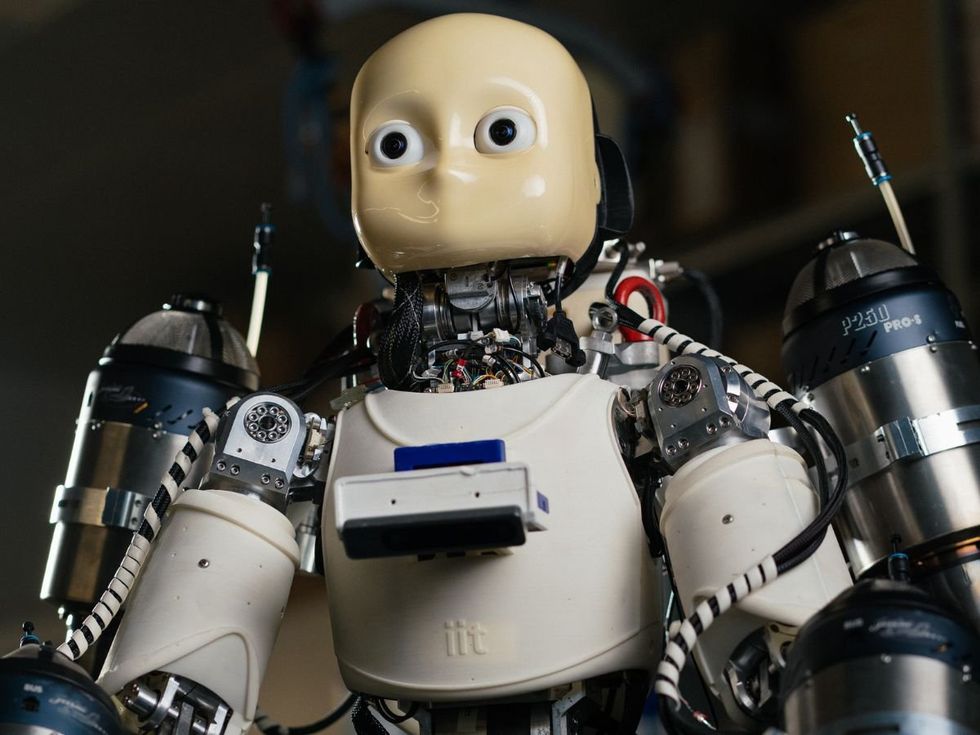
A breakthrough in robotics has occurred with the successful flight of the iRonCub, a flying humanoid robot developed by Daniele Pucci at the Italian Institute of Technology (IIT) in Genoa, Italy. After nearly a decade of research and development, the robot achieved stable flight for the first time, lifting 50 centimeters off the ground using its four jet engines. This significant milestone marks a potential shift in how robots could respond to emergencies such as floods and fires.
The iRonCub, designed to resemble a five-year-old child, has been in development since 2017. Pucci envisions this advanced robot as a disaster response platform capable of navigating hazardous environments with agility. In emergency situations, the iRonCub could quickly access locations that are hard to reach due to obstacles. Once it lands, the robot can transition to walking to conserve energy while utilizing its arms to move debris and open doors.
Creating a humanoid robot that can fly presents numerous challenges. The jet turbines mounted on iRonCub can generate over 1,000 N of thrust. However, the engine’s response time requires the robot to maintain stability autonomously by adjusting its arm-engines. “What is not visible from the video,” Pucci explains, “is that the exhaust gas from the turbines is at 800 degrees Celsius and almost supersonic speed.” This necessitates careful trajectory planning to prevent the robot from being affected by its own exhaust.
Research from Pucci’s team has recently been published in Nature Engineering Communications, highlighting a comprehensive approach to model and control aerodynamic forces for humanoid robots. This work not only contributes to the iRonCub project but also has broader implications for the field of robotics.
The algorithms developed for thrust estimation could be applied to other flying platforms, such as electric vertical takeoff and landing (eVTOL) aircraft. Additionally, understanding aerodynamic compensation is crucial for humanoid robots, particularly in outdoor environments where wind may pose challenges. Pucci also noted a serendipitous collaboration with an industrial partner that led to insights in controlling a pneumatic gripper, demonstrating how innovations in one area can benefit others.
Future Developments and the Impact of iRonCub
Beyond its technical achievements, the iRonCub project serves as a catalyst for attracting talent to Pucci’s lab. Engaging projects inspire students and researchers, fostering a vibrant atmosphere akin to the excitement seen during events like the DARPA Robotics Challenge. As Pucci states, “It’s really cool,” underscoring the importance of passion in driving innovation.
Looking ahead, the team plans to introduce a new jetpack that will enhance yaw control and potentially add wings for more efficient long-distance flight. However, testing logistics are becoming increasingly complex, requiring coordination with the Genoa airport for more advanced trials.
Despite these challenges, Pucci remains optimistic. “This is not a joke. It’s something that we believe in. That feeling of doing something exceptional, or possibly historical, something that’s going to be remembered—that’s something that’s kept us motivated. And we’re just getting started.” The iRonCub’s journey is set to continue, promising exciting advancements in robotics and disaster response capabilities.