Future exploration of Mars will increasingly depend on effective human-robot collaboration to ensure astronaut safety and maximize scientific outcomes. Researchers are investigating innovative solutions such as digital twins, which can significantly aid in planning, simulating, and optimizing extravehicular activities. A recent study focused on developing and evaluating a digital twin for the AMADEE-24 analog Mars mission, organized by the Austrian Space Forum and conducted in Armenia in March 2024.
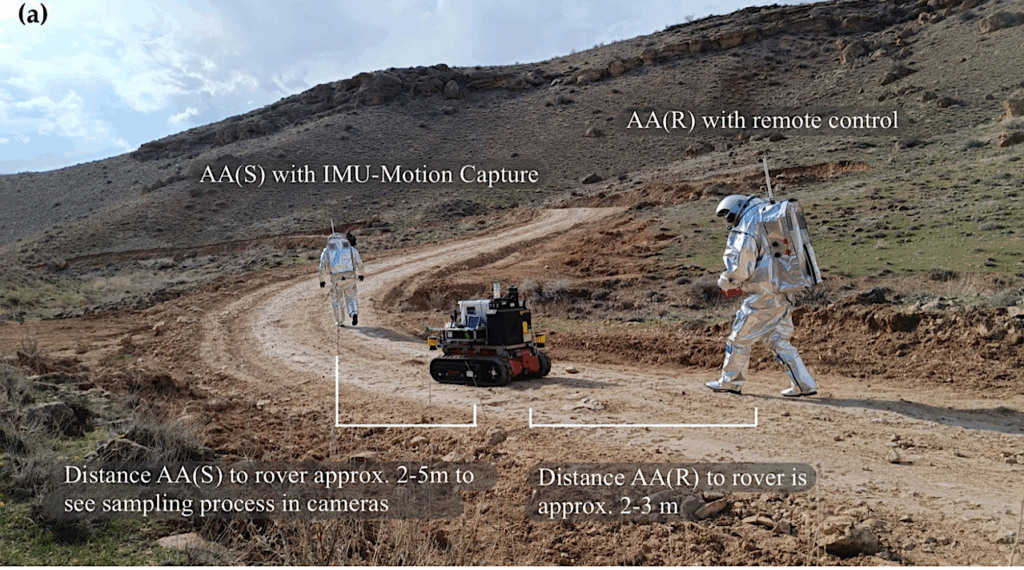
The study aimed to enhance the utility of local positioning methods in environments where Global Navigation Satellite System (GNSS) signals are unavailable. This research is critical as missions to Mars will often encounter regions where traditional navigation systems may not function effectively. By integrating telemetry from the Aouda space suit simulators, inertial measurement unit motion capture (IMU-MoCap), and sensor data from the Intuitive Rover Operation and Collecting Samples (iROCS) rover, the digital twin was able to replicate all nine experimental runs successfully.
Evaluation of Alternative Positioning Techniques
A comparative analysis of various localization methods revealed that the Simultaneous Localization and Mapping (SLAM)-based positioning of the rover, along with the IMU-MoCap localization of astronauts, performed comparably to Global Positioning System (GPS) capabilities. This finding underscores the potential for robust navigation even in the absence of GNSS. On the other hand, the Adaptive Cluster Detection method demonstrated significantly higher deviations in performance compared to traditional GNSS alternatives.
While the IMU-MoCap method showed promise, it faced challenges due to its reliance on segment-wise measurements that necessitated intermittent GPS recalibration. These limitations are important to note as researchers refine their approaches to local positioning in remote environments. Despite these hurdles, the study emphasizes how alternative localization techniques can be integrated effectively into digital twin systems, providing valuable insights for future missions.
Visualizing the Digital Twin Workflow
The workflow for the digital twin integration includes several phases: data acquisition, preprocessing and analysis, and final integration within the digital twin system. A visual representation from the study illustrates this chronological deployment of devices and sensors. The figure highlights key points of interest visited during extravehicular activities (EVA) and showcases the Universal Multi-Layer Map (UMM), which incorporates LiDAR scans of the surroundings. The traversability map is depicted in grey, while terrain hazards are marked in red, providing a clear visual guide for mission planning.
The research outlines the potential of alternative localization methods and illustrates how the digital twin can enhance mission planning for Mars exploration. As space agencies prepare for future missions, integrating advanced technologies such as digital twins may prove essential for ensuring astronaut safety and maximizing scientific returns. The findings from the AMADEE-24 mission represent a significant step forward in this endeavor.