A team of four robotic assistants successfully navigated a simulated Martian environment, guided by NASA astronaut Jonny Kim from the International Space Station (ISS). This unique collaboration, which took place in July 2023 at the German Aerospace Center (DLR) in Oberpfaffenhofen, involved advanced technology and artificial intelligence to conduct complex tasks typically reserved for human astronauts.
The mission marked the culmination of the DLR Surface Avatar experiment, which has been ongoing since 2022. Kim commanded the robots remotely while orbiting Earth, testing their ability to perform under challenging conditions. The results were promising, showcasing advancements in robotic control and coordination. According to Alin Albu-Schäffer, director of DLR’s Institute of Robotics and Mechatronics, “We have now achieved all the technical requirements for controlling complex robotic missions on Mars — and for a future permanent lunar research station.”
The experiment also aligns with Germany’s commitment to the Artemis Accords, a framework for international cooperation on lunar exploration, which is seen as a stepping stone for future missions to Mars.
Robotic Teamwork and Challenges
During this fourth and final exercise, Kim faced unique challenges, including assisting a robot named Bert, which simulated a leg injury. The experiment team intentionally disabled one of Bert’s legs to assess the robot’s adaptability. Kim conducted a “training” session, where he guided Bert in discovering a stable three-legged gait. Once the robot regained its mobility, it explored a series of simulated Martian caves, which featured drawings reminiscent of prehistoric art found in the Lascaux caves of France.
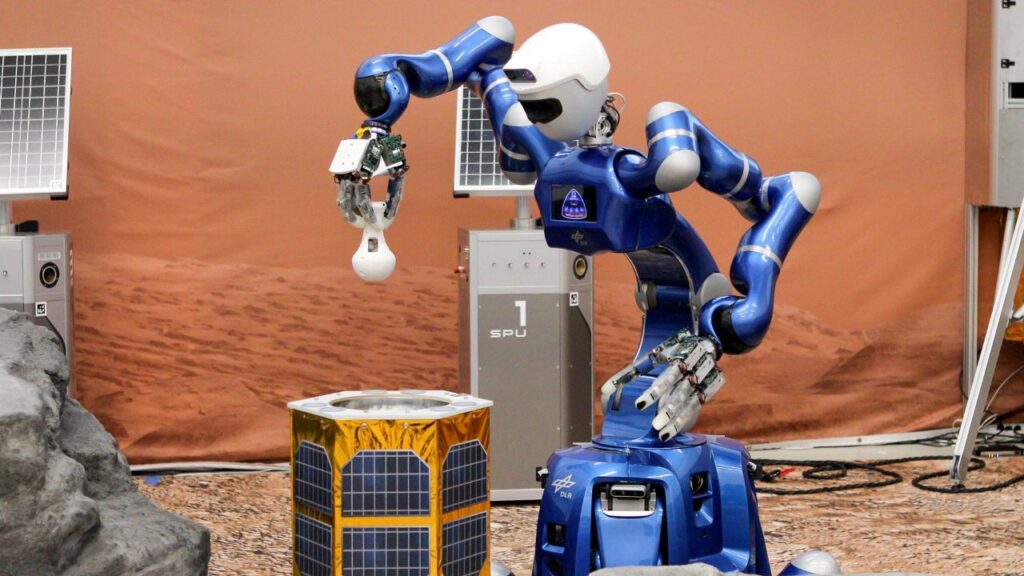
In the tight confines of the cave, Kim switched to manual control, utilizing Bert’s camera feed to navigate. He operated the robot using a joystick from the ISS, demonstrating the potential for real-time remote operations in extraterrestrial environments. Alongside Bert, Kim managed three additional robots: DLR’s Spot, the humanoid Rollin’ Justin, and the European Space Agency’s Interact rover. Notably, Kim successfully executed a robot-to-robot transfer, marking a significant milestone in robotic collaboration.
Technological Innovations and Future Prospects
The role of artificial intelligence was pivotal, with Neal AI, a chatbot, providing Kim with real-time support and answers during the mission. This integration of AI into space exploration highlights the growing reliance on technology to assist astronauts in complex tasks.
Spot, a newcomer to the Surface Avatar project, successfully located sample containers and transported them to designated areas using its gripper arm. Meanwhile, Rollin’ Justin facilitated the transfer of samples to a Martian-like lander. This collaborative effort resulted in the robots autonomously gathering and stacking Martian samples as Kim managed multiple tasks.
Thomas Krüger, team lead at the ESA’s Human-Robot Interaction Lab, noted, “By involving an astronaut in microgravity and using relay satellites, we have overcome the technical hurdles involved in the remote control of robots.” These experiments are expected to contribute to the Gateway project, NASA’s planned lunar orbiting space station, which aims to support both crewed and robotic missions to the Moon.
In a symbolic gesture to conclude the mission, Kim exchanged a virtual handshake with Neal Lii, a DLR scientist and principal investigator of the Surface Avatar experiment. The handshake was facilitated by Rollin’ Justin, which used force feedback technology to convey the sensation to both participants, illustrating the emotional connections that can be fostered through technology.
As space agencies continue to develop advanced robotic systems for exploration, this experiment signifies a step forward in the integration of humans and machines in the quest to explore the cosmos.